Design
PROJECT OVERVIEW
Create an autonomous rover capable of navigating to specified GPS coordinates and delivering a payload. For your missions the payload will be modeled as cubic wooden blocks ~1.5”x1.5”x1.5”. The rover should be capable of obstacle avoidance, navigating rough/uneven terrain, and meeting speed and navigation accuracy requirements. Missions our team will meet to demonstrate timely progress and project functionality can be found on the mission page.
Customer Requirements
•Autonomous rover capable of navigation GPS coordinates
•Obstacle avoidance --- Navigation on rough or uneven terrain
•Must meet speed in navigation accuracy requirements
•Deliver a payload to specified location
Engineering Specifications
•Read and interpret GPS coordinates from RF transmitter
•Navigate towards interpreted GPS coordinates
•Obstacle avoidance algorithms so as not to touch objects in its way
•Min speed of 1 ft./s
•Point in Cardinal directions
•Radial turn speed of 18° per second
•Be able to drop a payload
•The rover will be able to drive over obstacles 1in or smaller.
•Rover must weigh less than 4 pounds
•Dive within 10% of specified distance
•Turn angle accuracy of 15 degrees

WORK BREAK DOWN STRUCTURE

GHANT CHART
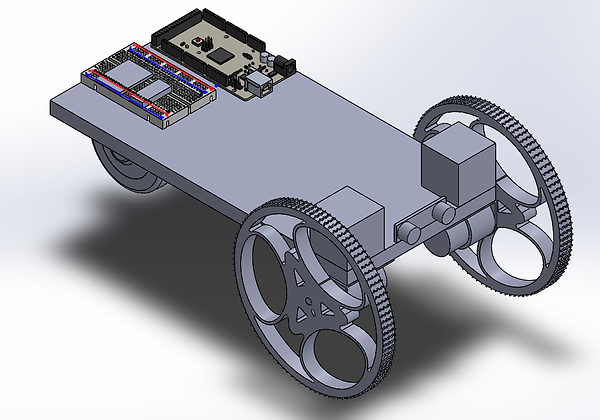

Mark 1 of the rover was an exact embodiment of what the concept generation phase said the rover should look like. You can see a two wheel drive system with a third caster wheel in the back of the rover.
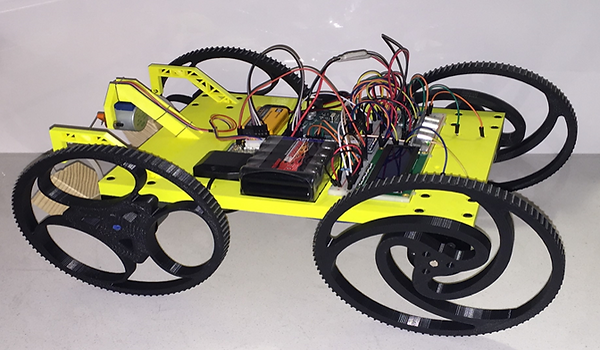
Mark 2 and 3 of the rover was a redesign after the failure of the lateral drift mission test. The caster wheel would not allow for the necessary direct travel required to perform calculations. A four wheel drive system was implemented along with a payload dropping mechanism located at the rear of the rover. Mark 3 was essistaally Mark 2 with our printed chassis design.